Modern production environments no longer benefit from the rigid, single-purpose assembly lines of the past. As product lifecycles shorten and consumer demand for customization rises, the ability to pivot between different manufacturing processes becomes a competitive necessity. At the center of this transition toward agility is the robotic tool changer—a hardware interface that allows a single robot arm to swap its End-of-Arm Tooling (EOAT) without manual intervention.
Technical Principles of Tool Interfaces
A quick changer functions as a bridge between the robot’s wrist and the specific tool required for a task, such as a gripper, a welding torch, or a vacuum head. These interfaces are designed to handle three primary types of connections: mechanical, pneumatic, and electrical.
Mechanical locking mechanisms ensure that the tool is held securely against the robot flange, often using a ball-locking or wedge-locking system. These systems must withstand significant centrifugal forces and moments during high-speed movements. Pneumatic and electrical interfaces, meanwhile, pass air pressure and data signals through the coupling. This ensures that the moment the robot “clicks” into a new tool, it gains immediate control over its functions without a technician needing to plug in cables or hoses.
Optimizing Robot Utilization Rates
In many small and medium-sized enterprises (SMEs), investing in a dedicated robot for every stage of production is financially impractical. A robot that only performs palletizing for two hours a day represents a significant amount of idle capital. By implementing a quick changer, that same robot can spend its morning tending a CNC machine, its afternoon performing quality inspections with a vision-based tool, and its final hour of the shift palletizing finished goods.
This multi-process approach drastically improves the return on investment (ROI). Instead of measuring success by the speed of a single task, managers can evaluate the total uptime of the robotic cell across diverse workflows. If you want to explore specific hardware compatibility for these setups, you can visit the website to see how various interfaces integrate with major robot brands.
Bridging Machine Tending and Quality Control
One of the most effective use cases for quick changers involves the integration of secondary processes into a primary workstation. In a traditional setup, a robot picks a raw part and places it into a lathe. Once the machining is done, the robot removes the part and places it on a conveyor.
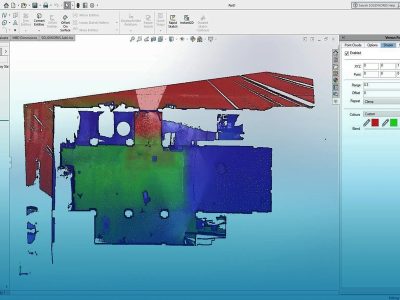
With an automated tool changer, the robot can swap its heavy-duty gripper for a high-precision metrology probe or a 3D scanner immediately after unloading the part. This allows for in-line quality inspection. By verifying dimensions while the next part is being machined, the system identifies defects in real-time. This prevents a faulty batch from progressing further down the line, saving both material costs and time.
The Dynamics of Repeatability and Safety
Frequent tool changes introduce variables that must be managed to maintain high precision. Industrial-grade quick changers are engineered for extreme repeatability, often within microns. This ensures that every time a tool is reattached, its TCP (Tool Center Point) remains consistent. Without this level of mechanical precision, the robot’s programming would drift, leading to misaligned parts or mechanical crashes.
Safety protocols are equally critical. Modern systems incorporate “fail-safe” locking mechanisms. These are designed so that even in the event of a total loss of pneumatic pressure or electrical power, the tool remains locked to the robot arm. Sensors within the changer body verify that the locking pins are fully engaged before the robot is permitted to enter its high-speed movement envelope.
Economic Trade-offs in Modular Architectures
Deciding between a modular setup and a dedicated robot requires a nuanced look at cycle times and throughput requirements. A quick changer adds a “changeover time” to the process—usually ranging from three to ten seconds. In high-volume, low-variety environments where every second of a cycle is optimized, this delay might be a bottleneck.
However, for high-mix, low-volume (HMLV) production, the benefits of flexibility far outweigh the few seconds lost during a tool swap. The cost of a quick changer and multiple tools is substantially lower than the floor space and capital required for three separate robotic stations. Furthermore, modular EOAT architectures allow companies to “future-proof” their investment. When a product line changes, the manufacturer only needs to acquire a new tool, rather than redesigning an entire automated cell.
Supporting Agile Manufacturing Strategies
Agility in manufacturing is defined by the speed at which a facility can respond to change. Quick changers facilitate this by reducing downtime during product transitions. In a manual environment, changing a robot’s tool might involve disconnecting wires, unbolting flanges, and recalibrating software—a process that can take thirty minutes or more.
Automated switching reduces this to a background task that occurs in seconds. This capability allows for “batch size of one” production, where the robot can theoretically change its configuration for every unit on the line. As software environments become more intuitive, the integration of these hardware changers is becoming seamless, allowing engineers to drag and drop different tool profiles into a single logic flow.
Reliability in Harsh Environments
The environment of the factory floor—filled with dust, oil, and vibrations—demands robust hardware. Quick changers are often rated for specific IP (Ingress Protection) levels to ensure that the internal locking components and electrical pins do not corrode or fail due to debris. In welding applications, specialized covers and shielding protect the interface from slag and intense heat.
Maintenance of these systems is typically minimal, involving periodic lubrication of the locking cam and inspection of the electrical contact pins. Because they are designed for millions of cycles, they often outlast the specific tools they carry. This reliability is a cornerstone of autonomous 24/7 “lights-out” manufacturing, where human intervention is kept to an absolute minimum.
The shift toward modular robotic cells represents a fundamental change in how production capacity is viewed. Rather than seeing a robot as a fixed tool for a fixed task, it is increasingly viewed as a versatile platform. The quick changer is the primary enabler of this versatility, providing the physical and digital link that allows automation to remain as flexible as the human workers it supports.










Comments